The starting point is with theoretical physics, where distance travelled, is kinetic energy divided with the braking force D = Ek / F.
In our case the braking force is the penetration resistance, and skin friction. Penetration resistance is a constant, and measured as the force needed to push a particular tip slowly through meat (Ro) – the resistance as speed approaches 0 fps.
The skin friction is a dynamic value depended on the total wet-able surface area, the form of the object, the density and viscosity of the medium, and the speed. For our purposes the density and viscosity is a constant and the form of the object is very roughly approximated with Ro. The friction then becomes k(Ro .A + a) v2, where A is the area of the tip, a is the area of the shaft, k some constant capturing the density and viscosity, and the speed (v) is squared, as skin friction in liquids is proportional to v2. Incidentally k=1 gives results that approaches observed results.
In order to predict penetration, we then integrate Δxi = m( Δx/ Δt)2 / (Ro + k(Ro.A+a)( Δx/ Δt)2); in other words, at each point during penetration, further penetration is determined by the arrows kinetic energy, at this particular point, and the friction, which is determined by the speed at this point.
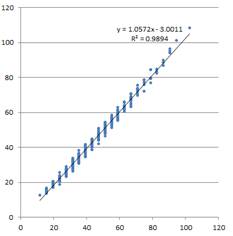
This we can approximate this to an average error of 1¾ of an
inch, with D = mv/(775Ro0.725).
The exact values of 775 and 0.725 is dependent on the ranges of m,v, and Ro, but does
not change much. These values are for m=(300..900g),
v=(200..300 fps), Ro=(5..12lbs)
The correlation is 99.5%, and 98.9% of the model is explained by the
approximation.
The approximation can now be rearranged to indicate required
Ek for a particular depth, so that we can
add the required kinetic energy to break ribs on entry to it, where by general
consent Eb ≈ 6.25W0.28.
The required depth of penetration is by general consent Dp ≈ 1.36 W 0.47
This first form of the equation, where required momentum is
converted to required Ek allow us to state
requirements in terms of soft tissue and hard tissue arguments:
Ek > [(1.36 W 0.47)(775Ro0.725)]2
/m/450240 + (6.25W0.28)
Although very useful, it is not possible to create a graph of the equation,
allowing for easy access to bow hunters. Also bow hunters do not think in terms
of soft tissue vs hard tissue penetration.
If we multiply this equation with m, we get a very
interesting equation:
m2v2 = (1.36 W 0.47)2(775Ro0.725)2 + 450240m(6.25W0.28)
This equation can be drawn on two graphs, but also we see only the tip and
animal in the first term, and only the arrow mass and animal in the second
term.
This means the 2nd equation provides us with requirements in terms
of the hunting tip, and arrow mass, in relation to the animal. Bow hunters are
familiar with these terms.
Another point of interest is that the requirements this are defined as neither Ek, nor momentum, but in terms of required
momentum squared.
The numeric values for P2 are quite large, and a scale of 1e8 is
used:
(m/100 x v/100)2 > [(1.36 W 0.47)2(775Ro0.725)2 + 450240m(6.25W0.28)]/1e8
This brings the P2 numerical range to about 100.